Base class of (analytical or triangulated) surface. Encapsulates all the search routines. WIP. More...
#include <meshTools/searchableSurface.H>
Base class of (analytical or triangulated) surface. Encapsulates all the search routines. WIP.
Information returned is usually a pointIndexHit:
Definition at line 65 of file searchableSurface.H.
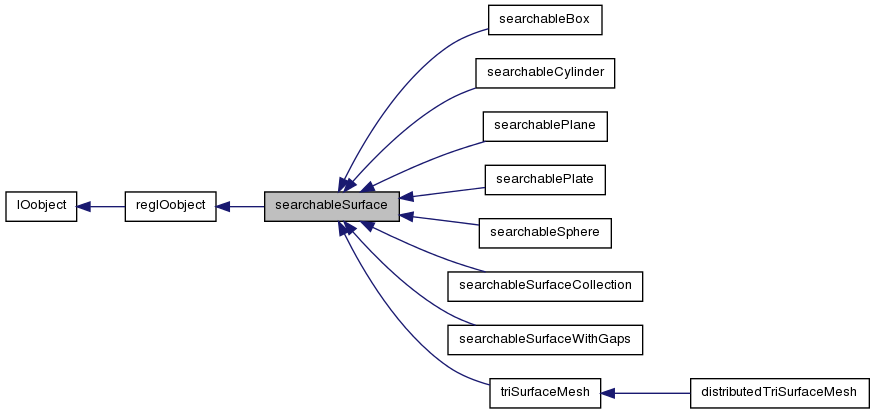
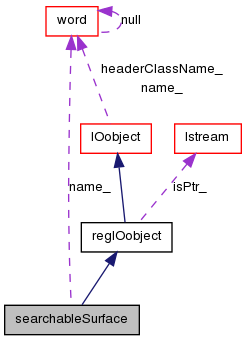
 Inheritance diagram for searchableSurface: Collaboration diagram for searchableSurface:
Inheritance diagram for searchableSurface: Collaboration diagram for searchableSurface:Classes | |
| class | iNew |
| Class used for the read-construction of. More...
| |
Public Types | |
| enum | volumeType { UNKNOWN = 0, MIXED = 1, INSIDE = 2, OUTSIDE = 3 } |
volume types More... | |
Public Member Functions | |
| TypeName ("searchableSurface") | |
| Runtime type information.
| |
| declareRunTimeSelectionTable (autoPtr, searchableSurface, dict,(const IOobject &io, const dictionary &dict),(io, dict)) | |
| searchableSurface (const IOobject &io) | |
| virtual autoPtr < searchableSurface > | clone () const |
| Clone.
| |
| virtual | ~searchableSurface () |
| virtual const wordList & | regions () const =0 |
| Names of regions.
| |
| virtual bool | hasVolumeType () const =0 |
| Whether supports volume type below.
| |
| virtual label | size () const =0 |
| Range of local indices that can be returned.
| |
| virtual label | globalSize () const |
| Range of global indices that can be returned.
| |
| virtual pointField | coordinates () const =0 |
| Get representative set of element coordinates.
| |
| virtual void | findNearest (const pointField &sample, const scalarField &nearestDistSqr, List< pointIndexHit > &) const =0 |
| virtual void | findLine (const pointField &start, const pointField &end, List< pointIndexHit > &) const =0 |
| Find first intersection on segment from start to end.
| |
| virtual void | findLineAny (const pointField &start, const pointField &end, List< pointIndexHit > &) const =0 |
| Return any intersection on segment from start to end.
| |
| virtual void | findLineAll (const pointField &start, const pointField &end, List< List< pointIndexHit > > &) const =0 |
| Get all intersections in order from start to end.
| |
| virtual void | getRegion (const List< pointIndexHit > &, labelList ®ion) const =0 |
| From a set of points and indices get the region.
| |
| virtual void | getNormal (const List< pointIndexHit > &, vectorField &normal) const =0 |
| From a set of points and indices get the normal.
| |
| virtual void | getVolumeType (const pointField &, List< volumeType > &) const =0 |
| Determine type (inside/outside) for point. unknown if.
| |
| virtual void | distribute (const List< treeBoundBox > &, const bool keepNonLocal, autoPtr< mapDistribute > &faceMap, autoPtr< mapDistribute > &pointMap) |
| Set bounds of surface. Bounds currently set as list of.
| |
| virtual void | setField (const labelList &values) |
| WIP. Store element-wise field.
| |
| virtual void | getField (const List< pointIndexHit > &, labelList &values) const |
| WIP. From a set of hits (points and.
| |
Static Public Member Functions | |
| static autoPtr< searchableSurface > | New (const word &surfaceType, const IOobject &io, const dictionary &dict) |
| Return a reference to the selected searchableSurface.
| |
| enum volumeType |
volume types
Definition at line 74 of file searchableSurface.H.
| searchableSurface | ( | const IOobject & | io ) |
Definition at line 69 of file searchableSurface.C.
| ~searchableSurface | ( | ) | [virtual]
|
Definition at line 77 of file searchableSurface.C.
| TypeName | ( | "searchableSurface" | ) |
Runtime type information.
| declareRunTimeSelectionTable | ( | autoPtr | , |
| searchableSurface | , | ||
| dict | , | ||
| (const IOobject &io, const dictionary &dict) | , | ||
| (io, dict) | |||
| ) |
| virtual autoPtr<searchableSurface> clone | ( | ) | const [inline, virtual]
|
Clone.
Reimplemented from IOobject.
Definition at line 151 of file searchableSurface.H.
References notImplemented.
| autoPtr< searchableSurface > New | ( | const word & | surfaceType, |
| const IOobject & | io, | ||
| const dictionary & | dict | ||
| ) | [static]
|
Return a reference to the selected searchableSurface.
Definition at line 40 of file searchableSurface.C.
References Foam::endl(), Foam::exit(), Foam::FatalError, and FatalErrorIn.
Referenced by searchableSurface::iNew::operator()(), and searchableSurfaces::searchableSurfaces().
| virtual const wordList& regions | ( | ) | const [pure virtual]
|
Names of regions.
Implemented in searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by refinementSurfaces::findHigherIntersection(), searchableSurfaceWithGaps::regions(), searchableSurfaces::searchableSurfaces(), and refinementSurfaces::setMinLevelFields().
| virtual bool hasVolumeType | ( | ) | const [pure virtual]
|
Whether supports volume type below.
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::hasVolumeType().
| virtual label size | ( | ) | const [pure virtual]
|
Range of local indices that can be returned.
Implemented in searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurface::globalSize(), and searchableSurfaceWithGaps::size().
| virtual label globalSize | ( | ) | const [inline, virtual]
|
Range of global indices that can be returned.
Reimplemented in distributedTriSurfaceMesh.
Definition at line 187 of file searchableSurface.H.
References searchableSurface::size().
Referenced by refinementSurfaces::setMinLevelFields().
| virtual pointField coordinates | ( | ) | const [pure virtual]
|
Get representative set of element coordinates.
Usually the element centres (should be of length size()).
Implemented in searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::coordinates(), and refinementSurfaces::setMinLevelFields().
| virtual void findNearest | ( | const pointField & | sample, |
| const scalarField & | nearestDistSqr, | ||
| List< pointIndexHit > & | |||
| ) | const [pure virtual]
|
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::findNearest(), and refinementSurfaces::setMinLevelFields().
| virtual void findLine | ( | const pointField & | start, |
| const pointField & | end, | ||
| List< pointIndexHit > & | |||
| ) | const [pure virtual]
|
Find first intersection on segment from start to end.
Note: searchableSurfacesQueries expects no intersection to be found if start==end. Is problem?
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
| virtual void findLineAny | ( | const pointField & | start, |
| const pointField & | end, | ||
| List< pointIndexHit > & | |||
| ) | const [pure virtual]
|
Return any intersection on segment from start to end.
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by refinementSurfaces::findHigherIntersection().
| virtual void findLineAll | ( | const pointField & | start, |
| const pointField & | end, | ||
| List< List< pointIndexHit > > & | |||
| ) | const [pure virtual]
|
Get all intersections in order from start to end.
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
| virtual void getRegion | ( | const List< pointIndexHit > & | , |
| labelList & | region | ||
| ) | const [pure virtual]
|
From a set of points and indices get the region.
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::getRegion(), and refinementSurfaces::setMinLevelFields().
| virtual void getNormal | ( | const List< pointIndexHit > & | , |
| vectorField & | normal | ||
| ) | const [pure virtual]
|
From a set of points and indices get the normal.
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::getNormal().
| virtual void getVolumeType | ( | const pointField & | , |
| List< volumeType > & | |||
| ) | const [pure virtual]
|
Determine type (inside/outside) for point. unknown if.
cannot be determined (e.g. non-manifold surface)
Implemented in distributedTriSurfaceMesh, searchableBox, searchableCylinder, searchablePlane, searchablePlate, searchableSphere, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Referenced by searchableSurfaceWithGaps::getVolumeType().
| virtual void distribute | ( | const List< treeBoundBox > & | , |
| const bool | keepNonLocal, | ||
| autoPtr< mapDistribute > & | faceMap, | ||
| autoPtr< mapDistribute > & | pointMap | ||
| ) | [inline, virtual]
|
Set bounds of surface. Bounds currently set as list of.
bounding boxes. The bounds are hints to the surface as for the range of queries it can expect. faceMap/pointMap can be set if the surface has done any redistribution.
Reimplemented in distributedTriSurfaceMesh, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Definition at line 317 of file searchableSurface.H.
| virtual void setField | ( | const labelList & | values ) | [inline, virtual]
|
WIP. Store element-wise field.
Reimplemented in searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Definition at line 326 of file searchableSurface.H.
| virtual void getField | ( | const List< pointIndexHit > & | , |
| labelList & | values | ||
| ) | const [inline, virtual]
|
WIP. From a set of hits (points and.
indices) get the specified field. Misses do not get set. Return empty field if not supported.
Reimplemented in distributedTriSurfaceMesh, searchableSurfaceCollection, searchableSurfaceWithGaps, and triSurfaceMesh.
Definition at line 332 of file searchableSurface.H.
References List< T >::clear().
Referenced by refinementSurfaces::findHigherIntersection(), and searchableSurfaceWithGaps::getField().