Holds data for octree to work on an edges subset. More...
#include <meshTools/octreeDataEdges.H>
Holds data for octree to work on an edges subset.
Definition at line 56 of file octreeDataEdges.H.
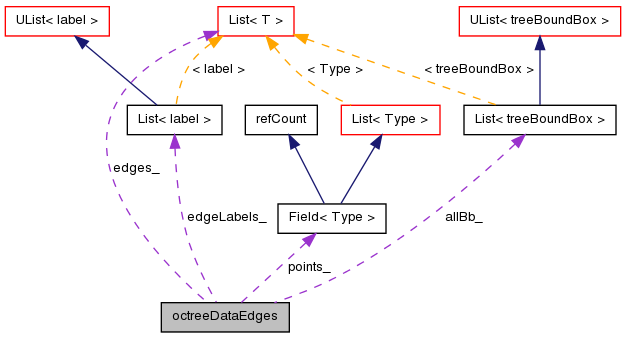
 Collaboration diagram for octreeDataEdges:
Collaboration diagram for octreeDataEdges:Public Member Functions | |
| ClassName ("octreeDataEdges") | |
| octreeDataEdges (const edgeList &edges, const pointField &points, const labelList &edgeLabels) | |
| Construct from selected edges. !Holds references to edges and points.
| |
| octreeDataEdges (const octreeDataEdges &) | |
| Construct as copy.
| |
| ~octreeDataEdges () | |
| const edgeList & | edges () const |
| const pointField & | points () const |
| const labelList & | edgeLabels () const |
| const treeBoundBoxList & | allBb () const |
| label | size () const |
| label | getSampleType (const octree< octreeDataEdges > &, const point &) const |
| Get type of sample.
| |
| bool | overlaps (const label index, const treeBoundBox &sampleBb) const |
| Does (bb of) shape at index overlap bb.
| |
| bool | contains (const label index, const point &sample) const |
| Does shape at index contain sample.
| |
| bool | intersects (const label index, const point &start, const point &end, point &intersectionPoint) const |
| Segment (from start to end) intersection with shape at index.
| |
| bool | findTightest (const label index, const point &sample, treeBoundBox &tightest) const |
| Sets newTightest to bounding box (and returns true) if.
| |
| scalar | calcSign (const label index, const point &sample, vector &n) const |
| Given index get unit normal and calculate (numerical) sign.
| |
| scalar | calcNearest (const label index, const point &sample, point &nearest) const |
| Calculates nearest (to sample) point in shape.
| |
| scalar | calcNearest (const label index, const linePointRef &ln, point &linePt, point &shapePt) const |
| Calculates nearest (to line segment) point in shape.
| |
| void | write (Ostream &os, const label index) const |
| Write shape at index.
| |
| octreeDataEdges | ( | const edgeList & | edges, |
| const pointField & | points, | ||
| const labelList & | edgeLabels | ||
| ) |
Construct from selected edges. !Holds references to edges and points.
Definition at line 48 of file octreeDataEdges.C.
References b, e, edge::end(), forAll, Foam::max(), Foam::min(), GeometricField< Type, PatchField, GeoMesh >::min(), and edge::start().
| octreeDataEdges | ( | const octreeDataEdges & | shapes ) |
Construct as copy.
Definition at line 76 of file octreeDataEdges.C.
| ~octreeDataEdges | ( | ) |
Definition at line 87 of file octreeDataEdges.C.
| ClassName | ( | "octreeDataEdges" | ) |
| const edgeList& edges | ( | ) | const [inline]
|
Definition at line 107 of file octreeDataEdges.H.
| const pointField& points | ( | ) | const [inline]
|
Definition at line 112 of file octreeDataEdges.H.
| const labelList& edgeLabels | ( | ) | const [inline]
|
Definition at line 117 of file octreeDataEdges.H.
Referenced by surfaceFeatures::nearestEdges().
| const treeBoundBoxList& allBb | ( | ) | const [inline]
|
Definition at line 122 of file octreeDataEdges.H.
| label size | ( | ) | const [inline]
|
Definition at line 127 of file octreeDataEdges.H.
References List< T >::size().
| Foam::label getSampleType | ( | const octree< octreeDataEdges > & | , |
| const point & | |||
| ) | const |
Get type of sample.
Definition at line 94 of file octreeDataEdges.C.
| bool overlaps | ( | const label | index, |
| const treeBoundBox & | sampleBb | ||
| ) | const |
Does (bb of) shape at index overlap bb.
Definition at line 104 of file octreeDataEdges.C.
References treeBoundBox::overlaps().
| bool contains | ( | const label | index, |
| const point & | sample | ||
| ) | const |
Does shape at index contain sample.
Definition at line 114 of file octreeDataEdges.C.
References notImplemented.
| bool intersects | ( | const label | index, |
| const point & | start, | ||
| const point & | end, | ||
| point & | intersectionPoint | ||
| ) | const |
Segment (from start to end) intersection with shape at index.
If intersects returns true and sets intersectionPoint
Definition at line 128 of file octreeDataEdges.C.
References notImplemented.
| bool findTightest | ( | const label | index, |
| const point & | sample, | ||
| treeBoundBox & | tightest | ||
| ) | const |
Sets newTightest to bounding box (and returns true) if.
nearer to sample than tightest bounding box. Otherwise returns false.
Definition at line 145 of file octreeDataEdges.C.
References treeBoundBox::calcExtremities(), dist, Foam::mag(), boundBox::max(), boundBox::min(), Vector< Cmpt >::x(), Vector< Cmpt >::y(), and Vector< Cmpt >::z().
Given index get unit normal and calculate (numerical) sign.
of sample. Used to determine accuracy of calcNearest or inside/outside.
Definition at line 183 of file octreeDataEdges.C.
References Vector< Cmpt >::zero.
Calculates nearest (to sample) point in shape.
Returns point and mag(nearest - sample).
Definition at line 197 of file octreeDataEdges.C.
References PointHit< Point >::distance(), e, edge::line(), line< Point, PointRef >::nearestDist(), and PointHit< Point >::rawPoint().
| Foam::scalar calcNearest | ( | const label | index, |
| const linePointRef & | ln, | ||
| point & | linePt, | ||
| point & | shapePt | ||
| ) | const |
Calculates nearest (to line segment) point in shape.
Returns distance and both point.
Definition at line 215 of file octreeDataEdges.C.
References e, edge::line(), and line< Point, PointRef >::nearestDist().
| void write | ( | Ostream & | os, |
| const label | index | ||
| ) | const |
Write shape at index.
Definition at line 231 of file octreeDataEdges.C.