Six degree of freedom motion for a rigid body. Angular momentum stored in body fixed reference frame. Reference orientation of the body (where Q = I) must align with the cartesian axes such that the Inertia tensor is in principle component form. More...
#include <forces/sixDoFRigidBodyMotion.H>
Six degree of freedom motion for a rigid body. Angular momentum stored in body fixed reference frame. Reference orientation of the body (where Q = I) must align with the cartesian axes such that the Inertia tensor is in principle component form.
title = {Symplectic splitting methods for rigid body molecular dynamics}, publisher = {AIP}, year = {1997}, journal = {The Journal of Chemical Physics}, volume = {107}, number = {15}, pages = {5840-5851}, url = {http://link.aip.org/link/?JCP/107/5840/1}, doi = {10.1063/1.474310}
Can add restraints (i.e. a spring) and constraints (i.e. motion may only be on a plane).
Definition at line 83 of file sixDoFRigidBodyMotion.H.
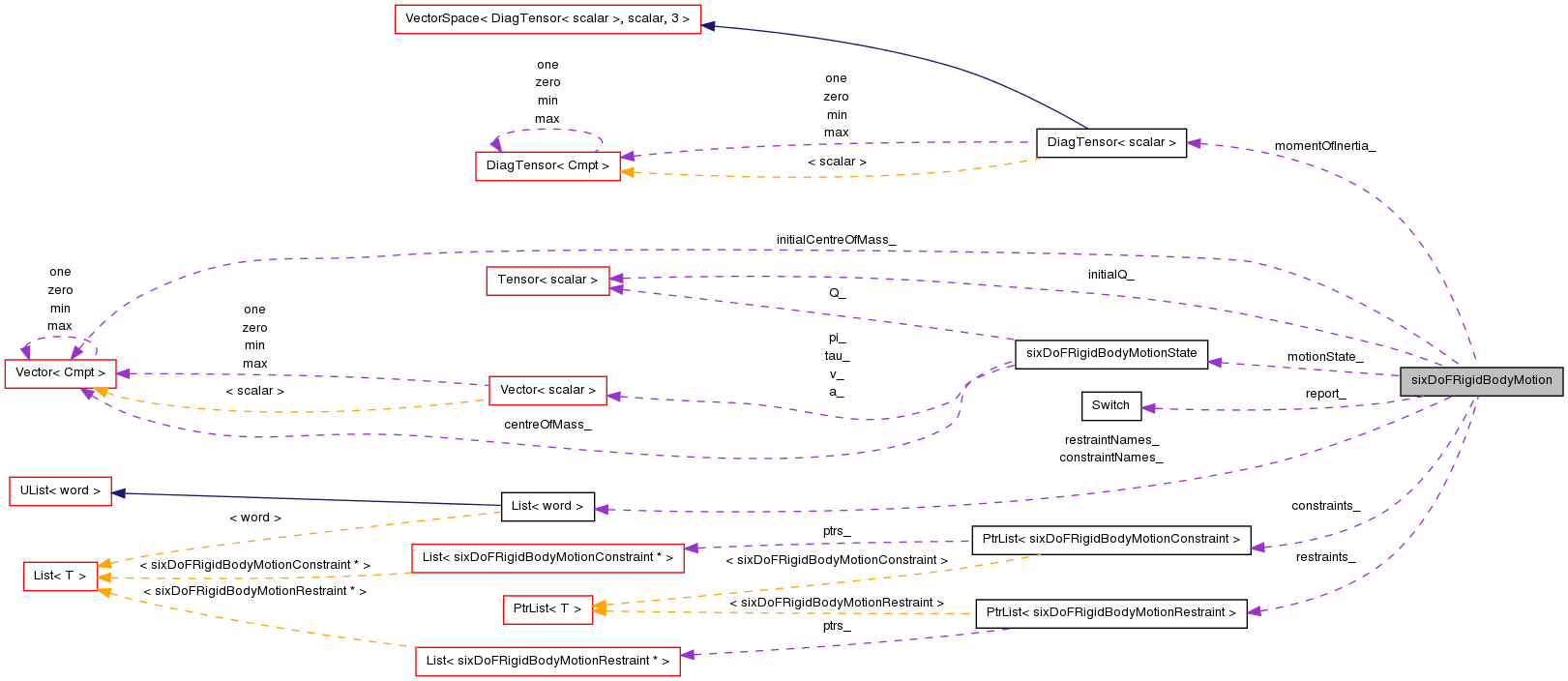
 Collaboration diagram for sixDoFRigidBodyMotion:
Collaboration diagram for sixDoFRigidBodyMotion:Public Member Functions | |
| sixDoFRigidBodyMotion () | |
| Construct null.
| |
| sixDoFRigidBodyMotion (const point ¢reOfMass, const tensor &Q, const vector &v, const vector &a, const vector &pi, const vector &tau, scalar mass, const point &initialCentreOfMass, const tensor &initialQ, const diagTensor &momentOfInertia, scalar cDamp=0.0, scalar aLim=VGREAT, bool report=false) | |
| Construct from components.
| |
| sixDoFRigidBodyMotion (const dictionary &dict) | |
| Construct from dictionary.
| |
| sixDoFRigidBodyMotion (const sixDoFRigidBodyMotion &) | |
| Construct as copy.
| |
| ~sixDoFRigidBodyMotion () | |
| Destructor.
| |
| void | addRestraints (const dictionary &dict) |
| Add restraints to the motion, public to allow external.
| |
| void | addConstraints (const dictionary &dict) |
| Add restraints to the motion, public to allow external.
| |
| void | updatePosition (scalar deltaT, scalar deltaT0) |
| First leapfrog velocity adjust and motion part, required.
| |
| void | updateForce (const vector &fGlobal, const vector &tauGlobal, scalar deltaT) |
| Second leapfrog velocity adjust part, required after motion and.
| |
| void | updateForce (const pointField &positions, const vectorField &forces, scalar deltaT) |
| Global forces supplied at locations, calculating net force.
| |
| tmp< pointField > | currentPosition (const pointField &pInitial) const |
| Transform the given initial state pointField by the current.
| |
| point | currentPosition (const point &pInitial) const |
| Transform the given initial state point by the current motion.
| |
| vector | currentOrientation (const vector &vInitial) const |
| Transform the given initial state direction by the current.
| |
| const tensor & | orientation () const |
| Access the orientation tensor, Q.
| |
| point | predictedPosition (const point &pInitial, const vector &deltaForce, const vector &deltaMoment, scalar deltaT) const |
| Predict the position of the supplied initial state point.
| |
| vector | predictedOrientation (const vector &vInitial, const vector &deltaMoment, scalar deltaT) const |
| Predict the orientation of the supplied initial state.
| |
| vector | omega () const |
| Return the angular velocity in the global frame.
| |
| point | currentVelocity (const point &pt) const |
| Return the velocity of a position given by the current.
| |
| void | status () const |
| Report the status of the motion.
| |
| const point & | centreOfMass () const |
| Return const access to the centre of mass.
| |
| const diagTensor & | momentOfInertia () const |
| Return access to the inertia tensor.
| |
| scalar | mass () const |
| Return const access to the mass.
| |
| bool | report () const |
| Return the report Switch.
| |
| point & | centreOfMass () |
| Return non-const access to the centre of mass.
| |
| diagTensor & | momentOfInertia () |
| Return non-const access to the inertia tensor.
| |
| scalar & | mass () |
| Return non-const access to the mass.
| |
| void | write (Ostream &) const |
| Write.
| |
Friends | |
| Istream & | operator>> (Istream &, sixDoFRigidBodyMotion &) |
| Ostream & | operator<< (Ostream &, const sixDoFRigidBodyMotion &) |
Construct null.
Definition at line 165 of file sixDoFRigidBodyMotion.C.
| sixDoFRigidBodyMotion | ( | const point & | centreOfMass, |
| const tensor & | Q, | ||
| const vector & | v, | ||
| const vector & | a, | ||
| const vector & | pi, | ||
| const vector & | tau, | ||
| scalar | mass, | ||
| const point & | initialCentreOfMass, | ||
| const tensor & | initialQ, | ||
| const diagTensor & | momentOfInertia, | ||
| scalar | cDamp = 0.0,
|
||
| scalar | aLim = VGREAT,
|
||
| bool | report = false
|
||
| ) |
Construct from components.
Definition at line 184 of file sixDoFRigidBodyMotion.C.
| sixDoFRigidBodyMotion | ( | const dictionary & | dict ) |
Construct from dictionary.
Definition at line 224 of file sixDoFRigidBodyMotion.C.
References sixDoFRigidBodyMotion::addConstraints(), and sixDoFRigidBodyMotion::addRestraints().
| sixDoFRigidBodyMotion | ( | const sixDoFRigidBodyMotion & | sDoFRBM ) |
Construct as copy.
Definition at line 253 of file sixDoFRigidBodyMotion.C.
Destructor.
Definition at line 275 of file sixDoFRigidBodyMotion.C.
| void addRestraints | ( | const dictionary & | dict ) |
Add restraints to the motion, public to allow external.
addition of restraints after construction
Definition at line 282 of file sixDoFRigidBodyMotion.C.
References forAllConstIter, dictionary::found(), sixDoFRigidBodyMotionRestraint::New(), DLListBase::size(), and dictionary::subDict().
Referenced by sixDoFRigidBodyMotion::sixDoFRigidBodyMotion().
| void addConstraints | ( | const dictionary & | dict ) |
Add restraints to the motion, public to allow external.
addition of restraints after construction
Definition at line 322 of file sixDoFRigidBodyMotion.C.
References forAllConstIter, dictionary::found(), dictionary::lookup(), sixDoFRigidBodyMotionConstraint::New(), DLListBase::size(), and dictionary::subDict().
Referenced by sixDoFRigidBodyMotion::sixDoFRigidBodyMotion().
| void updatePosition | ( | scalar | deltaT, |
| scalar | deltaT0 | ||
| ) |
First leapfrog velocity adjust and motion part, required.
before force calculation. Takes old timestep for variable timestep cases.
Definition at line 370 of file sixDoFRigidBodyMotion.C.
References Foam::endl(), Foam::mag(), Pstream::master(), Foam::min(), Foam::mathematicalConstant::pi(), Pstream::scatter(), and WarningIn.
Referenced by uncoupledSixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs(), and sixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs().
Second leapfrog velocity adjust part, required after motion and.
force calculation
Definition at line 419 of file sixDoFRigidBodyMotion.C.
References Foam::endl(), Foam::mag(), Pstream::master(), Foam::min(), Foam::mathematicalConstant::pi(), Pstream::scatter(), Tensor< Cmpt >::T(), and WarningIn.
Referenced by uncoupledSixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs(), and sixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs().
| void updateForce | ( | const pointField & | positions, |
| const vectorField & | forces, | ||
| scalar | deltaT | ||
| ) |
Global forces supplied at locations, calculating net force.
and moment
Definition at line 477 of file sixDoFRigidBodyMotion.C.
References forAll, Pstream::master(), Foam::sum(), and Vector< Cmpt >::zero.
| Foam::tmp< Foam::pointField > currentPosition | ( | const pointField & | pInitial ) | const [inline]
|
Transform the given initial state pointField by the current.
motion state
Definition at line 224 of file sixDoFRigidBodyMotionI.H.
Referenced by fixedPoint::constrain(), fixedPlane::constrain(), fixedLine::constrain(), linearSpring::restrain(), uncoupledSixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs(), and sixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs().
| Foam::point currentPosition | ( | const point & | pInitial ) | const [inline]
|
Transform the given initial state point by the current motion.
state
Definition at line 235 of file sixDoFRigidBodyMotionI.H.
| Foam::vector currentOrientation | ( | const vector & | vInitial ) | const [inline]
|
Transform the given initial state direction by the current.
motion state
Definition at line 248 of file sixDoFRigidBodyMotionI.H.
| const Foam::tensor & orientation | ( | ) | const [inline]
|
Access the orientation tensor, Q.
globalVector = Q & bodyLocalVector bodyLocalVector = Q.T() & globalVector
Definition at line 257 of file sixDoFRigidBodyMotionI.H.
Referenced by fixedAxis::constrain(), tabulatedAxialAngularSpring::restrain(), sphericalAngularSpring::restrain(), and linearAxialAngularSpring::restrain().
| Foam::point predictedPosition | ( | const point & | pInitial, |
| const vector & | deltaForce, | ||
| const vector & | deltaMoment, | ||
| scalar | deltaT | ||
| ) | const |
Predict the position of the supplied initial state point.
after deltaT given the current motion state and the additional supplied force and moment
Definition at line 502 of file sixDoFRigidBodyMotion.C.
References Foam::mathematicalConstant::pi(), and Tensor< Cmpt >::T().
Referenced by fixedPoint::constrain(), fixedPlane::constrain(), and fixedLine::constrain().
| Foam::vector predictedOrientation | ( | const vector & | vInitial, |
| const vector & | deltaMoment, | ||
| scalar | deltaT | ||
| ) | const |
Predict the orientation of the supplied initial state.
vector after deltaT given the current motion state and the additional supplied moment
Definition at line 528 of file sixDoFRigidBodyMotion.C.
References Foam::mathematicalConstant::pi(), and Tensor< Cmpt >::T().
Referenced by fixedOrientation::constrain(), and fixedAxis::constrain().
| Foam::vector omega | ( | ) | const [inline]
|
Return the angular velocity in the global frame.
Definition at line 263 of file sixDoFRigidBodyMotionI.H.
References Foam::inv(), and Foam::mathematicalConstant::pi().
Referenced by tabulatedAxialAngularSpring::restrain(), sphericalAngularSpring::restrain(), and linearAxialAngularSpring::restrain().
| Foam::point currentVelocity | ( | const point & | pt ) | const [inline]
|
Return the velocity of a position given by the current.
motion state
Definition at line 270 of file sixDoFRigidBodyMotionI.H.
Referenced by linearSpring::restrain().
| void status | ( | ) | const |
Report the status of the motion.
Definition at line 544 of file sixDoFRigidBodyMotion.C.
References Foam::endl(), Foam::Info, and Foam::nl.
| const Foam::point & centreOfMass | ( | ) | const [inline]
|
Return const access to the centre of mass.
Definition at line 278 of file sixDoFRigidBodyMotionI.H.
Referenced by fixedOrientation::constrain(), fixedAxis::constrain(), tabulatedAxialAngularSpring::restrain(), sphericalAngularSpring::restrain(), linearAxialAngularSpring::restrain(), and sixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs().
| const Foam::diagTensor & momentOfInertia | ( | ) | const [inline]
|
Return access to the inertia tensor.
Definition at line 285 of file sixDoFRigidBodyMotionI.H.
Referenced by fixedOrientation::constrain(), and fixedAxis::constrain().
| Foam::scalar mass | ( | ) | const [inline]
|
Return const access to the mass.
Definition at line 291 of file sixDoFRigidBodyMotionI.H.
Referenced by fixedPoint::constrain(), fixedPlane::constrain(), fixedLine::constrain(), uncoupledSixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs(), and sixDoFRigidBodyDisplacementPointPatchVectorField::updateCoeffs().
| bool report | ( | ) | const [inline]
|
Return the report Switch.
Definition at line 297 of file sixDoFRigidBodyMotionI.H.
Referenced by tabulatedAxialAngularSpring::restrain(), sphericalAngularSpring::restrain(), linearSpring::restrain(), and linearAxialAngularSpring::restrain().
| Foam::point & centreOfMass | ( | ) | [inline]
|
Return non-const access to the centre of mass.
Definition at line 303 of file sixDoFRigidBodyMotionI.H.
| Foam::diagTensor & momentOfInertia | ( | ) | [inline]
|
Return non-const access to the inertia tensor.
Definition at line 309 of file sixDoFRigidBodyMotionI.H.
| Foam::scalar & mass | ( | ) | [inline]
|
Return non-const access to the mass.
Definition at line 315 of file sixDoFRigidBodyMotionI.H.
| void write | ( | Ostream & | os ) | const |
Write.
Definition at line 31 of file sixDoFRigidBodyMotionIO.C.
References token::BEGIN_BLOCK, Foam::decrIndent(), PtrList< T >::empty(), token::END_BLOCK, token::END_STATEMENT, Foam::endl(), forAll, Foam::incrIndent(), Foam::indent(), Foam::nl, sixDoFRigidBodyMotionState::write(), and Ostream::writeKeyword().
Referenced by sixDoFRigidBodyDisplacementPointPatchVectorField::write().
| Istream& operator>> | ( | Istream & | , |
| sixDoFRigidBodyMotion & | |||
| ) | [friend]
|
| Ostream& operator<< | ( | Ostream & | , |
| const sixDoFRigidBodyMotion & | |||
| ) | [friend]
|